
Monday, May 24, 2010
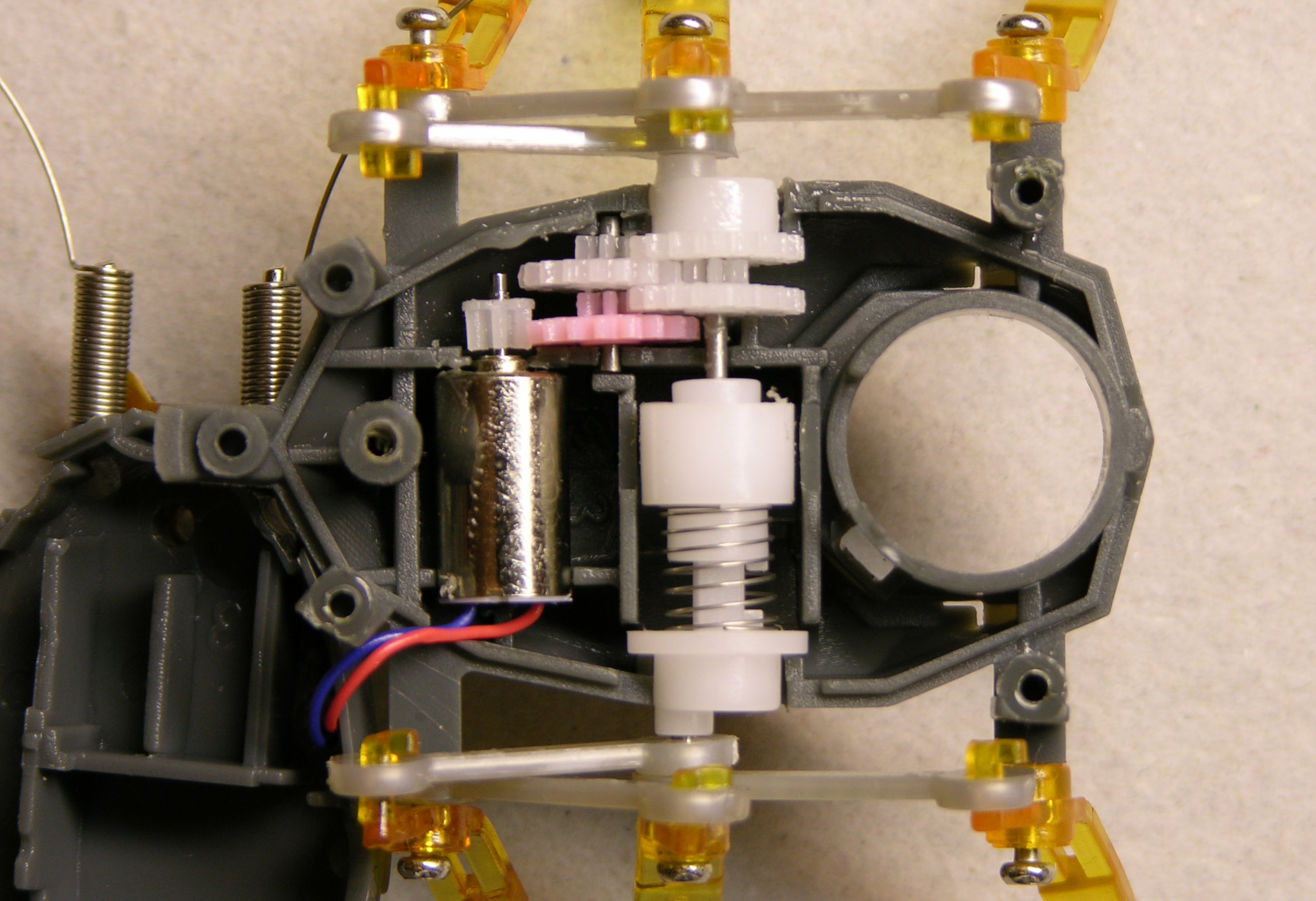
Team 120 - Prototype MoonBot Rover
Subscribe to:
Post Comments (Atom)
The adventures of robotic teams associated with mentor Edward Fielding featuring kids with a thirst for learning, science, engineering, programing, building, robots, technology and generally workin' the noggin.
“If you're not making mistakes, you're not taking risks, and that means you're not going anywhere. The key is to make mistakes faster than the competition, so you have more chances to learn and win.” - John W. Holt, Jr.


{kind=link}
No comments:
Post a Comment